- 产品
- 样本
- 公司
- 图纸
- 论文
- 软件


|

|

|

|

|

|

|

|

|

|
在控制命令源越接近驱动元件越好的潮流下,台达ASDA-A2增添了许多令人惊叹的元素,整合了部分上位机的运动控制功能。
内含电子凸轮 ( E-CAM ),是飞剪 ( Flying Shear ) 与追剪 ( Rotary shear ) 界的一把利刃,是需使用凸轮做同步控制的*佳伙伴。全新的位置控制模式( PR Mode),更是经典,无人能出其右。

支持多种运动控制网路功能 ( CANopen、DMCNET、EtherCAT ),可以让使用者顺利的连结
整个系统。全闭环控制、自动高频共振抑制 ( Auto Notch Filter )、悬臂梁晃动抑制 ( Vibration
Suppression )、与龙门控制功能 ( Gantry ),更可看出 A2 精湛的工艺。高精度 20-bits 编码器,
是精准定位的必备武器。高速脉冲撷取功能 ( Capture)与高速脉冲比较功能 ( Compare ),是无
段定位的*佳辅佐。高响应速度频宽 1kHz,是推动 A2 快速反应的引擎。
新创的 ASDA-Soft PR 路径编辑软件与高速监控示波器,是方便 ASDA-A2 使用的*佳推手。
台达 ASDA-A2 **是值得您藉重与托付的高才。

台达ASDA-A2系列伺服驱动器,是您在跨进高阶控制领域的重要选择!
产品介绍相关解决方案服务与工具档案下载联系我们
LELEA台达交流伺服驱动器ASDA-A2系列快稳准产品介绍
产品特色
搭配 20-bit(1280000 p/rev)增量型编码器,低速运转下实现精准定位控制。
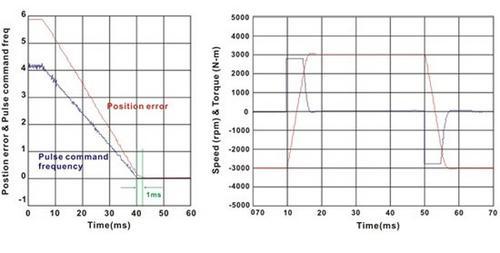
速度响应带宽可达1kHz,优异的性能表现。
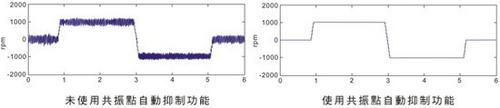
提供抑制悬臂梁晃动:Pulse Command Notch Filter以及FFT机械共振点分析,可达到自动机械共振抑制。
LELEA台达交流伺服驱动器ASDA-A2系列快稳准内建功能强大的「运动控制」模式。
- 内部位置缓存器增加至64点, 速度缓存器增加至16点, 参数数据量增大至32-bit。
- 提供「路径定义」功能,大大提高行程规划的自由度。
- 支持「插断」、「重迭」等位置命令,实现中途变换定位距离及运行速度的需求。
- 首创内建电子凸轮功能,轮廓点数可达720点,两点间自动平滑插补。
- 提供「CAPTURE」和「COMPARE」功能,提高全闭回路定位控制之精准度。
ASDA-A2驱动器本体宽度与ASDA-A系列相比,大幅缩小40%。

软件接口使用USB(type B)型式,针对市面上的笔记本电脑可以快速连接。
右侧的扩充插槽支持多种模块化设计。
ASDA-A2-L 特色:
内建机械位置反馈讯号接口(CN5), 支持A、B、Z相讯号(光学尺或编码器),提高定位精度。
搭配内建电子凸轮功能,可以满足多种的轴动控制。
ASDA-A2-M 特色:
符合 CANopen 标准协议DS301 -- CAN Bus通讯速率1M bps
符合 CANopen 标准协议DS402三种运动模式(Interpolation Position Mode、Profile Position Mode、Homing Mode)

站号配置可由韧体功能设定
使用标准网络通讯线材,线材长度*长可达40米
*多可支持127轴的高速通讯连接
ASDA-A2-U 特色:
提供14点的DI数字输入讯号点数。
搭配NC 控制器、中大型PLC的命令控制,可实现复杂的过程控制。
快速接头方便客户在配在线能够简单使用。
内建DC 24V省去外接电源的繁琐。
ASDA-A2-E 特色:
可藉由CN7中两个专属DI或外接编码器来实现高速位置抓取功能
内置STO,符合EN 61800-5-2 ; IEC 61508(SIL2) ; IEC 62061(SIL2) ; ISO 13849-1(Cat.3 ,PL=d)
支持220V及400V,机种广泛
支持全闭循环控制
支持**型及增量型ECMA系列马达
应用领域
精密雕刻机、精密车/铣床、龙门加工、TFT面板切割、机械手臂、IC封装机、高速包装机、CNC加工设备、射出加工设备
技术规格
ASDA-A2系列共有五个机种:ASDA-A2-L, ASDA-A2-M, ASDA-A2-F, ASDA-A2-U, ASDA-A2-E




 台达AX-816EP0MB1T系列PLc高阶级稳定代理商全新现货
¥7900 元/台
台达AX-816EP0MB1T系列PLc高阶级稳定代理商全新现货
¥7900 元/台
 深圳台达变频器代理商VFD32AMS43ANSAA全新现货
¥3500 元/台
深圳台达变频器代理商VFD32AMS43ANSAA全新现货
¥3500 元/台
 台达AX-8系列高阶运动控制器PLC
¥1999 元/台
台达AX-8系列高阶运动控制器PLC
¥1999 元/台
 delta台达DVP系列PLC控制器DVP40EH00R3
¥1600 元/台
delta台达DVP系列PLC控制器DVP40EH00R3
¥1600 元/台
 台达ASDA-A3永磁式交流伺服电机一级区域代理
¥6666 元/台
台达ASDA-A3永磁式交流伺服电机一级区域代理
¥6666 元/台
 ASD-A2-1B43-E台达伺服驱动器11kw扩充接口DI及PR参数
¥5800 元/台
ASD-A2-1B43-E台达伺服驱动器11kw扩充接口DI及PR参数
¥5800 元/台
 AM drives经济型伺服系统7.5kw力士乐面向亚太地区中端伺服市场
¥2 元/台
AM drives经济型伺服系统7.5kw力士乐面向亚太地区中端伺服市场
¥2 元/台
 AX-3台达标准进阶泛用型PLC
¥999 元/台
AX-3台达标准进阶泛用型PLC
¥999 元/台
 深圳台达变频器代理商台达MH300系列变频器全新原装现货
¥2680 元/台
深圳台达变频器代理商台达MH300系列变频器全新原装现货
¥2680 元/台
 LELEA台达交流伺服驱动器ASDA-A2系列快稳准
¥9999 元/台
LELEA台达交流伺服驱动器ASDA-A2系列快稳准
¥9999 元/台
 台达工业组态软件DIAV-0051200UPA单机升级版256
¥5869 元/台
台达工业组态软件DIAV-0051200UPA单机升级版256
¥5869 元/台