- 产品
- 样本
- 公司
- 图纸
- 论文
- 软件


|
|
|

|

|

|

|

|
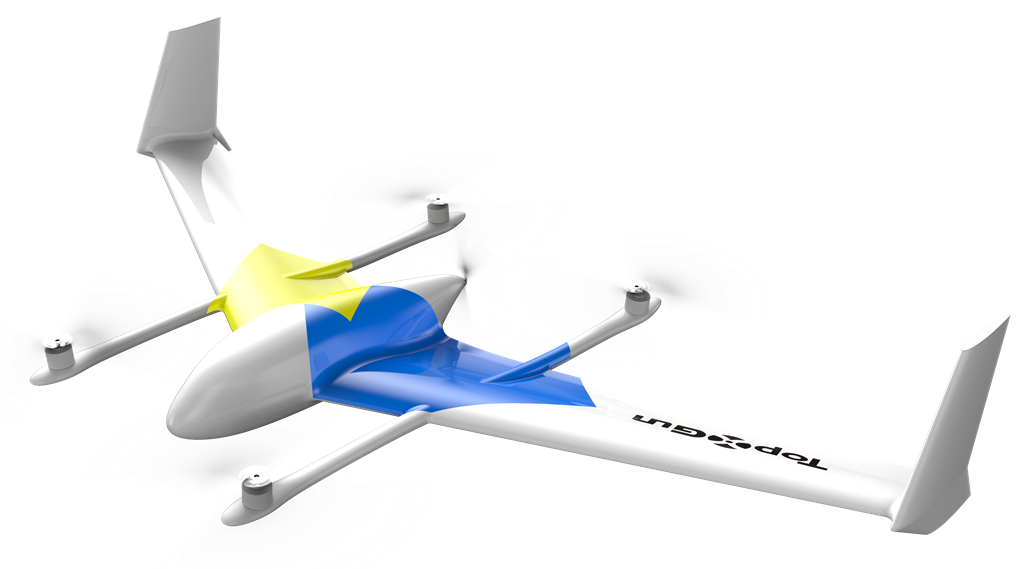
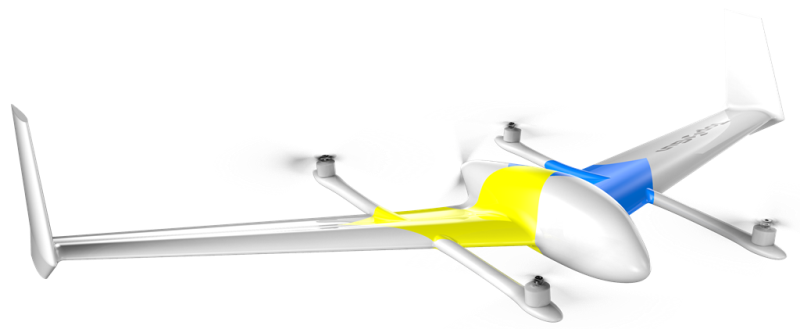
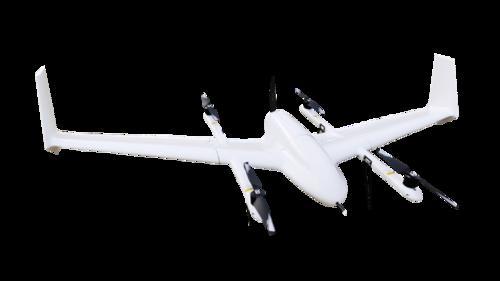
单兵垂起固定翼无人机巡检测绘监控垂直起降
星辰05垂起固定翼无人机
一、星辰05垂起无人机平台性能
星辰05垂起无人机在正常负载情况下拥有超过90分钟的超长续航时间和120千米的续航里程,可有效覆盖周边区域,开展长时间、大面积巡查,可以应用于测绘、林业、安防、电力、环境保护、河道、海洋渔政等领域。在同级别垂起固定翼无人机领域具有突出的优势,具体有以下四点。
1、可靠性高
星辰05垂起无人机系统突出可靠性考虑,在总体设计之初即综合考虑可靠性设计,设计了双余度控制舵面,在任一舵面失效情况下依然能够保持对无人机的控制;在飞控硬件上,采用了非相似双余度IMU陀螺仪,某一个遇到问题后能够实现自动切换;整机航电硬件经过36项严苛可靠性环境测试,确保硬件可靠;在飞控软件系统上,制定了完整的可靠保护策略,包括自动返航、自动失控保护、低高度旋翼保护、大风天起飞保护等;系统功能上具备旋翼和固定翼两种飞行状态,互为可靠备份。
2、总体性能优异
星辰05垂起无人机系统设计严格按照军工级飞行器研发流程正向设计开发,从飞机总体设计、外形设计、结构设计、气动计算,到控制律设计、半实物仿真、实测飞行,共完成了200余次气动优化,3000余小时半实物仿真和500余小时的实测飞行,目前实测91分50秒的续航时间,超过同类产品性能52%,确保了无人机系统的突出性能。
3、操作简便快捷
星辰05垂起飞机采用三段式机身结构设计,单人操作1分钟即可完成现场组装,3分钟即可飞上天。兼容便携式安卓地面站和多功能PC地面站,支持指点飞行、区域航线飞行和带状航线等多种飞行模式,使得任务作业更加简单便捷。
4、星辰05垂起无人机平台性能指标
翼展:1830mm
机长: 1000mm
续航时间: 90分钟
续航里程: 115km
巡航速度: 21m/s(75km/h)
飞行速度: 33m/s(118km/h)
起飞重量: 6kg
电池: 6s 14000-18000mah
升限: 4500m
起降场地: 3m*3m
定位精度: 水平≤±0、5m,高程≤±0、5m
抗风能力: ≤8m/s(起降阶段)、≤12m/s(固定翼阶段)
地面站系统: 安卓/Windows
链路距离: 30km
作业温度范围 :-10-+45℃
可靠性保障: 非相似双余度IMU;双余度舵面;双余度动力系统;选配降落伞
SDK:提供二次开发包和半实物仿真系统
可控性措施: 加入民航云平台,具备电子围栏功能
星辰05垂起无人机平台详细参数
1、飞机类型:4+1式垂起固定翼飞机,性能更稳定可靠;
2、纯电机动力,振动小,噪音低,无污染;
3、复合材料一体化机身,采用固定翼与四旋翼结合的复合机型设计;
4、机身尺寸:机长≤1100mm,翼展≤1900mm;
5、升限:≥3000m;
6、巡航速度:≥70km/h,≤126km/h;
7、导航卫星::L1+L2
8、机身自重(含电池和载荷):≤6000g ;
9、留空时间:搭载载荷时≥90min;
10、工作温度(电池除外):-10~+45°C;
11、存放湿度:≥
60%,工作湿度:≥ 75%;
12、抗风能力:≥8m/s(多旋翼阶段)、≥12m/s(固定翼阶段);
13、工业标准结构,接口可靠方便,不同载荷转换快捷方便;
14、无需借助工具,全套设备(含地面站、传感器)展开时间:≤3min;
15、降落精度:水平≤0、5米,高程≤0、5米。
16、模块化设计:整个飞机分为3部分,拆装方便,可靠性高。
17、固定翼舵面余度控制:含双余度4个舵面。
飞控系统:
1、全自主起飞和降落,飞行过程无需人工干预;
2、全面的可靠保障机制,如卫星信号丢失、姿态不可控等可靠保护机制、自动返航机制、地面站断电保护机制等;
3、垂起无人机自动失速保护,姿态失控保护。固定翼模式飞行中,如果出现失速、高度过低或姿态失控,飞控将自动启动多旋翼系统进行辅飞行;
4、垂起无人机紧急原地迫降功能;
5、自动返航功能。低电压返航,计算返航距离等综合因素,保证飞机在电量充足的情况下可靠降落。在飞行过程中如遇天气突变等突发状况时,也可操作一键返航功能紧急返回,有效地降低飞行事故的发生;
6、紧急返航将按照预先设置的返航轨迹回航,盘旋降高后再进场降落;
7、动态航点操控,可实时改变任务,飞行中可改变任意航点,无人机将立即做出响应;可跳转至任意一个航点;可暂停任务,原地盘旋;
8、所有传感器均无需做人工校准,简化操作流程,避免人为操作失误。磁罗盘一般只需要在装机做校准,使用中将随环境变化做自适应。使用高精度特殊空速计,无需校准;
9、POS数据自动存储,无人机断电不丢失;
10、POS数据可通过电台或连接USB一键导出;
11、内置记录所有飞行数据的“黑匣子”,空间不足将自动删除旧数据;
12、可预设飞机极值保护,限定飞机俯仰角,横滚角,上升下降率,高度,速度;
13、便捷开发能力:配备机载计算机,搭载Linux操作系统,对用户提供SDK,用户可基于SDK进行应用场景二次开发。采用不少于四核处理器,主频不低于1、2GHZ,同时搭载不低于2GBDDR3运行内存和不低于16GB EMMC存储空间。
14、高速联网能力:内置高速4G模块,支持实现对无人机的超远程控制、集群控制、远程实时监控等应用。
15、仿真培训系统:选配仿真计算机及视景显示软件,内置多悬翼仿真模型,能够实现与飞控计算机和视景窗口的实时通信,实现机载应用软件的仿真验证。
16、能够接入民航局授权的云系统。
二、任务载荷与控制链路

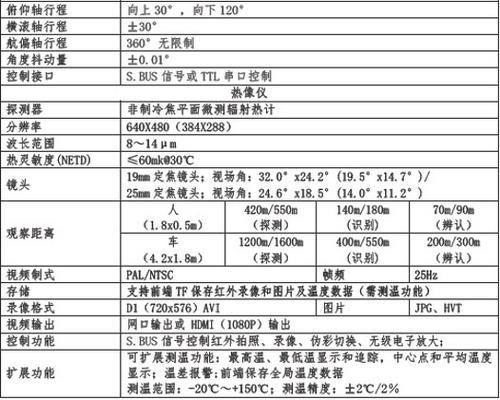
红外载荷吊舱
1、挂载在无人机上,实现夜间对监控区域的管控,红外波段波长范围在8-13、5um,采用非制冷焦平面微测辐射热计探测器,能够在夜间有效发现地面人员、车辆等特征目标。
2、吊舱分辨率不小于384*288,能够在200米高度,对于地面的人员、车辆进行有效探测、识别并辨认。
3、无人机拍摄的红外图像可以通过图数一体化数据链进行回传,传输距离不小于30千米,传输制式为网口或者HDMI。
4、影像回传连续稳定,传输频率不小于25HZ
5、地面站指挥员可以通过远程地面站,对吊舱进行实时控制,实现红外拍照、录像、伪彩切换、无级电子放大等功能,横向控制转动角度应为360度,云台保持稳定,抖动量不大于0、1°。
可见光载荷
1、吊舱挂载在无人机上,可以在白天对靶区进行监控巡查,范围能够有效覆盖靶场区域。
2、飞机可以在空中对靶区情况进行实时监控,吊舱图像可以通过图数一体数据链实时回传至地面指挥控制站,如发现地面异常人员、车辆、动物和目标时,可以引导飞机进行盘旋。吊舱可实时回传1080P高清图像,光学变焦倍率不小于10倍。
3、图像传输距离不小于30KM,在此区域内可保证图像和数据的清晰稳定
4、图像传输接口为HDMI或者网口,同时可以通过SBUS接口对吊舱的角度、方向进行实时控制。
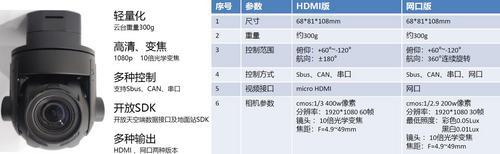
轻量化云台,重量300g
1080p
10倍光学变焦,分辨率:1920*1080 60帧
多种控制,支持Sbus、CAN、串口
SDK:天空端数据接口及地面站SDK
多种输出:HDMI 、网口两种版本
多功能无人机地面控制站
无人机地面站控制无人机系统和吊舱载荷系统,具备实时状态显示和指令上传的功能,地面无人机操作人员可以通过地面站对无人机和载荷进行实时控制,同时发现地面异常状态后,控制飞机进行盘旋,并对目标进行拍照等操作。
具体性能如下:
1、三防一体化地面控制站,具备昼夜间无人机控制、图像显示、远程操纵等功能;
2、地面站具备大容量充电电池,续航时间不小于5小时;
3、地面站对无人机控制范围不小于30千米;
4、全自动一键生成任务,地面站软件界面简洁,直观易懂;
5、干预降落应急处理。降落过程中如遇特殊情况,可人工干预选择应急降落或应急操作;
6、可设置禁飞区和限飞区,帮助用户有效合理地规划航线,避免不必要的矛盾或事故发生;
7、动态航点操控(实时改变任务)。飞行中可改变任意航点,无人机将立即做出响应;可跳转至任意一个航点;可暂停任务,原地盘旋。做到改变任务,所有操作只需要在地图界面完成,简单直观,操作立刻同步任务到无人机;
8、支持电子地图进行航线规划;
9、地图预先存储功能,支持分级存储;
10、地面站系统可采用多平台,支持APP和WINDOS笔记本操作,可根据用户需求进行选择;
11、实时接收无人机回传影像信息。
 120倍测温型红外双光热成像云台相机吊舱
¥85000 元/套
120倍测温型红外双光热成像云台相机吊舱
¥85000 元/套
 单兵垂起固定翼无人机巡检测绘监控垂直起降
¥80000 元/套
单兵垂起固定翼无人机巡检测绘监控垂直起降
¥80000 元/套
 行业飞控物流飞控巡检飞控环保飞控
¥5999 元/套
行业飞控物流飞控巡检飞控环保飞控
¥5999 元/套
 D640A 30倍红外双光变焦吊舱
¥80000 元/套
D640A 30倍红外双光变焦吊舱
¥80000 元/套
 垂直起降固定翼无人机
¥面议
垂直起降固定翼无人机
¥面议
 拓攻光学吊舱
¥70000 元/套
拓攻光学吊舱
¥70000 元/套
 拓攻30倍光学变焦吊舱
¥70000 元/套
拓攻30倍光学变焦吊舱
¥70000 元/套
 拓攻30倍变焦云台
¥70000 元/套
拓攻30倍变焦云台
¥70000 元/套
 拓攻X30光学变焦吊舱
¥70000 元/套
拓攻X30光学变焦吊舱
¥70000 元/套
 TopXGun X30光学变焦吊舱
¥70000 元/套
TopXGun X30光学变焦吊舱
¥70000 元/套


