- 产品
- 样本
- 公司
- 图纸
- 论文
- 软件


|

|
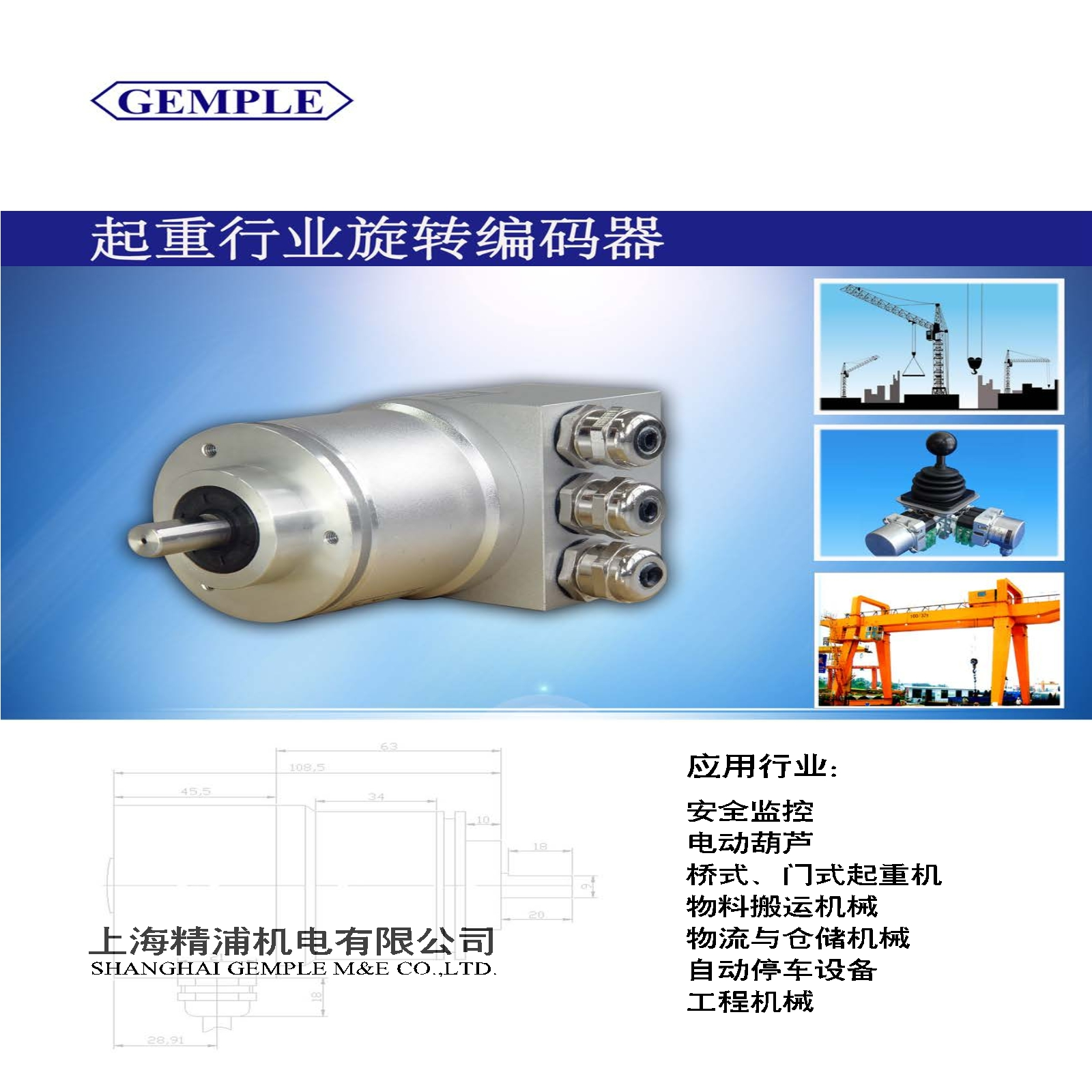
**值编码器与电动葫芦的工程应用案例
关键词:电动葫芦,起重设备自动化,起重机械自动化,起重机安全监控,三菱PLC,欧姆龙PLC,西门子PLC,同步,模拟量编码器,RS485编码器,Modbus编码器,汽车生产线自行小车,汽车涂装线,电镀生产线,全自动垃圾吊。
上海某电子厂洁净车间环链电动葫芦,用编码器控制上升停止位和下降停止位,因为每一个工位的停止位置完全不同,而且洁净车间无法人工进入手动操作,所以要求电动葫芦按程序要求自动控制。该电动葫芦为日本KITO变频电动葫芦,起吊高度高,运行速度快,对工件的停止位置的准确性有一定的要求 配置: 机械式**值多圈编码器: GAX60 PLC 品牌: 三菱 模拟量输入模块 编码器输出信号:编码器4-20mA和RS485信号, PLC采集信号:4-20mA, PLC输出开关点:电机启、停、正反转,加速和减速点。 工作原理: 编码器可安装于电机一侧,也可安装于链轮一侧,安装在电机侧结构简单方便,易于改造容易实现(见图),安装在链轮侧需要厂家对电动葫芦做一定的改造,一般集成在葫芦的内部,用一根轴和编码器相对接(见图),我们建议安装于环链电动葫芦的链轮一侧,控制精度较高。PLC为客户自己选用的三菱品牌,配一个模拟量的模块用以接收编码器的信号。 开始运行时,**值编码器将位置信号发送到PLC,PLC根据程序设定的加速点,将指令发送到变频器上,电动葫芦开始工作时,缓缓启动逐渐加快速度,以保证所吊装的工件稳定起吊,到达起吊高度后根据程序缓停,到达工作位置放下工件时,电机提前多点连续减速,在到达设定工位时缓缓停下。减速点和加速点以及停止位由**值编码器保证,准确位置停止,并不受停电后位置移动影响,而且编码器紧靠电机和电磁刹车,没有受到这两大干扰源影响,数据稳定输出。 带的Easypro软件,可以根据用户实际使用情况,对编码器参数进行设定,因为是采集4-20mA模拟信号,需要计算葫芦的链轮直径,即葫芦电机转一圈是多少高度距离,继而推算出总高度需要运行多少圈数,通过Easypro软件可以轻松对相关参数进行设置,比如测量模式、*大圈数对应的值,通过设置可以将模拟量输出精度控制在*高范围内,方便用户的应用。
特性参数
工作电压: 10…30Vdc极性保护
消耗电流: < 60mA(24Vdc)空载
输出信号: 4~20mA,RS485,(Easypro自由协议),可设定长度、角度、速度应用输出 ,可选modbus输出
线性分辨率: 1/65536FS
连续圈数: 1~4096圈
重复精度: 重复性±2BIT(实际精度与安装精度、轴同心度有关)
EasyPro: RS485信号转RS232或转USB连接计算机,可EasyPro智能设定
信号调整: 可4mA输出微调,20 mA输出微调;可方向设置;可预设位置,外部置位,例如外部置零
工作温度: -25~80℃ 编程时温度范围:0℃~70℃
储存温度: -40~80℃
防护等级: 外壳IP67 转轴IP65
振动冲击: 20g,10~2000Hz;100g,6ms
允许转速: 2400转/分
连接电缆: 1米屏蔽电缆径向侧出(其余形式可订货)
外形特征: 金属外壳,密封双轴承结构
 西门子Profinet**值编码器
¥2500 元/个
西门子Profinet**值编码器
¥2500 元/个
 闸门开度式 生态下泄流量 多圈**值编码器
¥1500 元/个
闸门开度式 生态下泄流量 多圈**值编码器
¥1500 元/个
 上海精浦多圈**值编码器modbus RTU输出
¥1900 元/个
上海精浦多圈**值编码器modbus RTU输出
¥1900 元/个
 上海精浦角度**值编码器modbus输出
¥900 元/个
上海精浦角度**值编码器modbus输出
¥900 元/个
 上海精浦角度**值编码器ssi输出
¥900 元/个
上海精浦角度**值编码器ssi输出
¥900 元/个
 上海精浦ssi编码器 兼容西门子338模块
¥900 元/个
上海精浦ssi编码器 兼容西门子338模块
¥900 元/个
 上海精浦垃圾抓斗起重机编码器Profibus-DP
¥1900 元/个
上海精浦垃圾抓斗起重机编码器Profibus-DP
¥1900 元/个
 起重安全监控双信号多圈**值编码器
¥1500 元/个
起重安全监控双信号多圈**值编码器
¥1500 元/个
 起重机械控制系统多圈**值编码器
¥1500 元/个
起重机械控制系统多圈**值编码器
¥1500 元/个
 智能I/O起重控制编码器
¥2500 元/个
智能I/O起重控制编码器
¥2500 元/个
 数字化和智能化电动葫芦全行程**值编码器
¥2500 元/个
数字化和智能化电动葫芦全行程**值编码器
¥2500 元/个