- 产品
- 样本
- 公司
- 图纸
- 论文
- 软件


 1、电子防摇技术:减轻司机劳动强度,达到熟练工操作效率。
1、电子防摇技术:减轻司机劳动强度,达到熟练工操作效率。
--实现小车的速度控制和精确定位;
--抓斗的摆动控制:小车做出主动协调动作控制抓斗的摆动,减少机械冲击,并可实现存在初始摆动及
干扰情况下的抓斗自动消摆控制,稳定性高。
2、半自动*优路径控制,缩短循环时间,实时生成高效、安全的抓斗半自动运行路径。
3、静态卸料、动态卸料,根据不同的物料特性设计的卸料方式,实现高效的定位卸料。
4、抓斗自动开闭斗及深挖控制,实现抓斗抓取量达到*优。
5、提升防溜钩控制:基于力矩效验功能来实现良好的速度控制和抱闸控制,保证起升安全。
6、同步提升控制:实现支持、开闭机构同步起升和下降。
7、力矩平衡控制:保证支持、开闭机构均衡分担负载力矩,有效防止空中开斗造成洒料。
8、俯仰自动挂钩、脱钩控制,实现安全的俯仰挂钩和脱钩的全自动控制。
9、卸船机CMS,具有友好的人机界面,智能化的故障处理及设备维护功能,减少维护和操作员工作强度。
 设备远程监控与管理系统(CMMS)
¥9.5 元/个
设备远程监控与管理系统(CMMS)
¥9.5 元/个
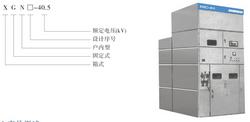 XGN□-40.5固定式交流金属封闭开关设备
¥10 元/个
XGN□-40.5固定式交流金属封闭开关设备
¥10 元/个
 桥式抓斗卸船机解决方案
¥15 元/个
桥式抓斗卸船机解决方案
¥15 元/个


